热点资讯
- 朝阳供应弹簧钢60Si2Mn热处理工艺、60Si2Mn屈服强度是多少-富宝报价
- 北京AISI4340合金结构钢光圆板材AISI4340合金结构钢货全
- 江苏20crni现货
- 2024欢迎访问##阿拉善盟NHR-3300A-Es-X三相视在电能表公司
- 上海博虎特钢18CrNi4A小直径18CrNi4A——化学成分及用途
- 浙江403钢注重质量
- 岳阳市汽车钢St33化学成分、St33精品#2024恒鑫报价
- 天津市津南区辛庄镇槽钢 天津市津南区辛庄镇槽钢厂家 天津市津南区辛庄镇钢材市场
- 石家庄平山玻璃棉板哪里有卖
- 2024遵义SUP11A弹簧钢锻圆、SUP11A产地货源##益锋钢材
- 淮南H420LAD+Z镀锌薄板、H420LAD+Z热处理硬度高富宝
- 江苏022Cr25Ni7Mo4N御钢出品
吉林出售机电设备步进式LMSZDM150L1-7-24-110减速机
文章来源:ymcdkj
发布时间:2024-04-30 06:00:35
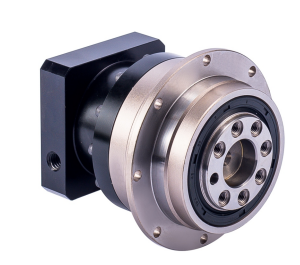
吉林出机电设备:步进式LMSZDM150L1-7-24-110减速机
热电偶探头用线起补偿作用,长或减短都引入误差。有时加长引线时接头处接触 或绝缘 造成漏电也加大或减小温控器输入电阻,应十分注意。2误差消除法重新调校温控仪。温控仪内部有可调校显示数值的微调电阻。对电子电器熟悉的人可拆温控仪重新调校。不懂的人切不可乱调。确认相对误差,设置控制温度。准备一支准确的 或 温度计,在欲控温度值(对亮镍液设为55℃)时看温控器数值显示值(为58℃),则将温控器预置温度设定为该值(58℃)。功率放大温控器内的小继电器允许电流很小,不能直接连接负载,而要用交流接触器来放大允许承载功率:温控器小继电器控制交流接触器线圈电流的通断,交流接触器主触头串在负载回路中。同一台温控器按照使用说明书接线要求,既可接成加热恒温控制也可接成制冷恒温控制。加热恒温控制时,液温下降到预置温度时,交流接触器吸合,主触头接通加热源(电加热时的电加热器,蒸汽加热时的供汽电磁阀)。制冷控制时,温度上升到预置温度时,交流接触器吸合,主触头接通制冷机启动或接通冷却供水的冷水电磁阀。
吉林出机 110减速机
现场中的精密行星减速机串轴故障均从输入轴的串动而表现出来。造成串轴的原因主要有两个方面:
1、是中间轴上的从动齿轮与轴紧固不牢所致。在实际传动中,往往由于从动齿轮与中间轴之间的过盈量不够,从动齿轮相对中间轴产生轴向串动,进而使输入轴发生轴向串动。因此,过盈量不够是造成串轴的主要原因。另外,精密行星减速机的转向对串轴也有一定的影响。
2、是由于断齿使输入轴失去轴向约束而发生串轴。
吉林出机电设备:步进
一台精密行星减速机出厂后,一般规则有200小时左右的磨合期(超越时刻有必要换油),这是齿轮减速机械运用初期的技术特点而规则的。磨合期是确保齿轮减速机正常工作,下降毛率,延伸其运用寿命的重要环节。
1、磨损速度快
因为新齿轮减速机零部件、和调试等要素的影响,合作面触摸面积较小,而许用的扭距较大。齿轮减速机在运转过程中,零件外表的高低有些彼此嵌合冲突,磨落下来的金属碎屑,又作为磨料,持续参与冲突,更加快了零件合作外表的磨损。因而,磨合期内简单形成零部件(特别是合作外表)的磨损,磨损速度过快。这时,如超负荷工作,则也许致使零部件的损坏,发生前期毛。
精密减速机在伺服控制中起的作用
在机械运动控制的中,精密齿轮减速机是一个机械能的转换环节,电机的转矩经精密齿轮减速机后得以放大,转速得以降低,反之,负载的转动惯量经精密齿轮减速机耦合到电机上,得以减小。
我们知道,理想的情况是传递过程功率守恒,但实际总是有损耗,设传递过程的效率是η,那么:/η=
又因为减速比i=/ =/ i(B-1)
所以=iη(B-2)
——电机力矩(NM),——载荷力矩(NM),
,——电机,载荷角速度(弧度/s)
我们再来看一下齿轮减速器对转动惯量的作用,由能量不灭的基本原理,在传动链中,同一时刻的储能相等:
从而得出:
Jem-——折算到电机轴上的等效转动惯量(kgm2)
JL——载荷转动惯量(kgm2)
从上述推演可看出,平时我们很熟悉的关于齿轮箱的公式,都是源自物理学的能量守恒定理。
上述的(1)—(3)表示了减速机的三个基本功能:
1. 降低伺服电机的转速( =/ i)
伺服电机的额 m之间,甚至高达10000rpm以上,实际使用过程中很少使用到如此高的转速,同时为了充分利用电机的额定功率,所以需要通过合适减速比的减速机来获得需要的工作转速。
2. 转矩放大(=iη)
在电机输入给减速机的功率一定的情况下,由于减速机输出速度的降低,必然会获得更大的输出转矩。很多情况下这也是选用减速机的一个重要理由。
3. 匹配负载转动惯量()
伺服电机的惯量是比较小的,一般来说折算到伺服电机本身的负载惯量不能超过伺服电机本身惯量的4倍(不同品牌伺服电机的设计有很具体的数据),而实际应用中的负载有很多种,如果负载的惯量与电机能接受的惯量相差太远,就会大大降低伺服电机的响应速度,从而影响生产效率和增大动态误差。而减速机就能起到匹配惯量的关键作用。
吉林出机电设备:步进
2-KLB5-KLB8< 6-7-8-10-KLB KLB5-KLB8
强电控制部分断路或元器件损坏:检查主轴供电这一线路各触点连接是否可靠,线路有否断路,直流继电器是否损坏,管是否烧坏。变频器参数未调好:变频器内含有控制方式选择,分为变频器面板控制主轴方式,NC系统控制主轴方式等,若不选择NC系统控制方式,则无法用系统控制主轴,修改这一参数;检查相关参数设置是否合理。不带变频的主轴(换档主轴)转速不受控故障原因方法:系统无S1-S4的控制信号输出:检查系统有无换档控制信号输出。
上一篇:上海5cr13不锈钢现货
下一篇:泊头别墅电梯多少钱一台